Гибридный навигационный мобильный робот

 Доставка и оплата
Доставка и оплата Сервис
Сервис-
Особенности
- Универсальная платформа для мобильных роботов.
- Низкопрофильный и компактный.
- Способность вращения.
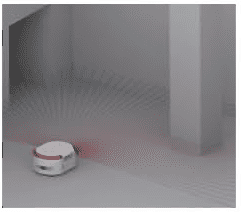
- Свободное переключение между лазерной SLAM и ленточной навигацией.
- Возможность добавления применимых устройств для подъема, вытягивания, манипулятора робота, роликовой линии и т.п. для обеспечения захвата и перемещения предметов.
Спецификация
Габариты (ДхШхВ)
1050 х 650 х 320 мм
810 х 600 х 380 мм
Полезная нагрузка
150 кг
75 кг
Скорость перемещения
5 – 48 м/мин.
Тип переноски
В сочетании с различными модулями для обеспечения необходимых функций
Навигация
Лазерная SLAM и ленточная гибридная навигация
Направления перемещения
Вперед, назад, вращение
Радиус поворота
Нулевой радиус
Точность позиционирования
Максимум ±10 мм
Коммуникации
Беспроводная локальная сеть / радиочастота
Батарея
Литиевая батарея
Способ зарядки
Ручная / настраиваемая автоматическая зарядка
Навигационный контроллер Han's AGV
Навигационный контроллер Han's представляет собой полнофункциональный модуль управления, с различными портами и простой установкой. Обычно его можно использовать после подключения лазерного локатора, пульта дистанционного управления, привода и модуль ввода / вывода. Что касается приводных решений, существует прямое подключение к приводу или косвенное управление через оригинальный ПЛК / однокристальный микрокомпьютер. Последнее решение используется в старой модификации AGV, которая может сэкономить много работы по настройке модификации.



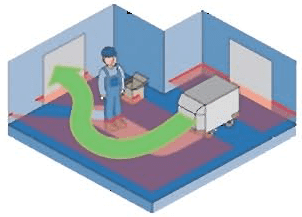
Управление с помощью джойстика Нанесение на карту с учётом препятствий Назначение маршрута Лазерная SLAM-навигация Динамическое избегание препятствий Доставка товара
- Доставка до любой точки России транспортными компаниями
- Срочная доставка DHL (2 дня в любую точку России)
- Поставка "под заказ" от 5 до 10 дней.
Оплата товара
Наличный и безналичный расчет
Гарантия
Официальная гарантия от производителя
Сервис
Ремонт и обслуживание
-
Отзывы

ПРЕДСТАВЛЕННЫХ БРЕНДОВ

НА ВСЕ ТОВАРЫ НАШЕГО МАГАЗИНА

КАЧЕСТВА

РАБОТАЕМ В СРОК